Getting to True Position in Six Degrees of Freedom
The new nanometer level of precision being achieved by next generation motion systems to meet the high precision demands of metrology, laser processing and micro-machining opens up a whole new realm of application possibilities. This white paper examines how it works.
Posted: July 30, 2014



As technology products steadily move toward sub-micron level miniaturization, the need for process application motion systems migrates from micro to True Nano® precision. True Nano is defined as true positioning performance at the bi-directional, nanometer level, as opposed to conventional unidirectional planar numbers which are typically several microns in true stage performance.
Advancements in manufacturing processes and metrology sensors, along with the continuing demand for more advanced manufacturing technologies and products, has driven the need for motion control systems that provide both higher accuracy and repeatability.
For many years, in order to achieve such precision at the micron-level or higher, hexapods have commonly been used where six degrees of freedom (6-DOF or 6-D) was needed. Thus, effectively reducing the footprint of serial kinematic stacked stage positioning systems, and most times reducing stacked stage error quotients.
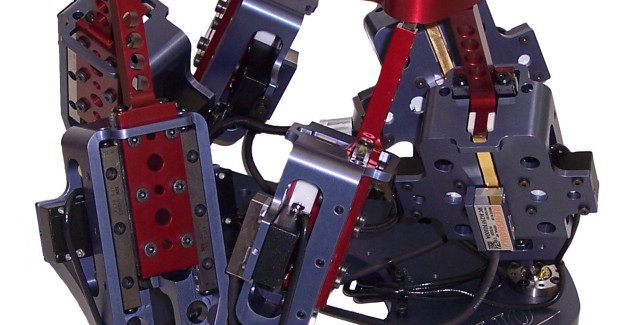
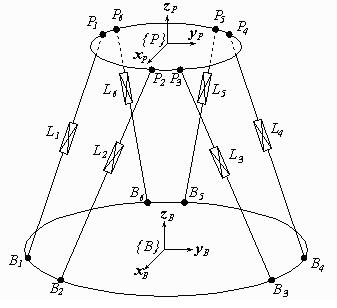
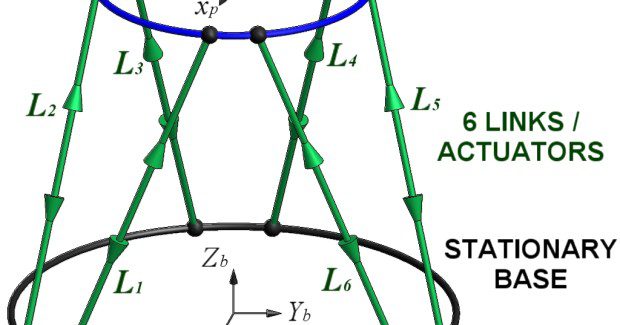
Hexapods, by definition, are six-legged parallel-kinematic mechanism (PKM) motion systems. In their most common form consisting of two platforms, a fixed base platform and a second movable platform, which are connected and supported by six independent legs (struts or links) that expand and contract in parallel (see Figure 1).
A demonstration of the Hybrid Hexapod® for 6-D Nano Precision®.
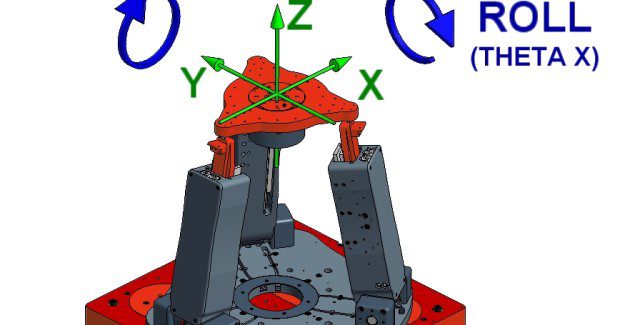
Coordinated motion of these six struts enables the movable platform, and devices mounted to it, to move in any direction, operating in 6-D relative to the base platform. With 6-DOF, the secondary platform is capable of moving in three linear directions, lateral (X) and longitudinal (Y), vertically (Z), and the three angular directions (pitch, roll and yaw), by the six legs. Because hexapods have all six degrees of freedom, they can perform manipulations that encompass total freedom of motion in three-dimensional space in a relatively compact space.
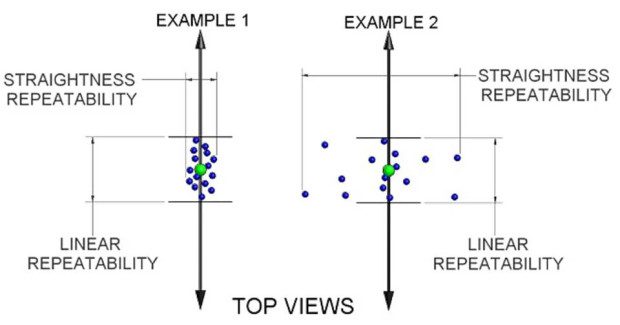
The hexapod has proved sufficient for precision at micron-level tolerances when a position in space is desired. As motion requirements have increased from micrometers to nanometers, so has the demand for bi-directional path motions such as straightness of path, smooth contours or spherical motion profiles.
In the past, other existing hexapod platforms in the current market could not meet these new nanometer-level motion requirements. This is due to performance limitations inherent in the conventional hexapod designs that require the task of accurately coordinating the movement all six axes to accomplish a motion profile, even when the need was a simple single-axis motion.
CONVENTIONAL HEXAPOD LIMITATIONS
With increasing demands for sub-nanometer levels of performance, and in order to achieve such high confidence levels of performance, motion control systems must be correctly characterized for operation within 6-DOF. These six degrees of freedom refers to the freedom of movement of a rigid body in three-dimensional space. Design considerations of cumulative error must be considered as part of any multi-axis stage design. Specific to the hexapod, the body is free to move forward and backward, up and down, left and right, combined with rotation about three perpendicular axes – pitch, yaw and roll.
All hexapod motion systems operate within three-dimensional space, and have errors in all six degrees of freedom. However, hexapod motion systems have typically only been characterized by performance data of a single degree of freedom. This practice leaves error sources unaccounted for in several degrees of freedom, especially with flatness and straightness which are critical precision needs in the nano-age. The hexapod’s best flatness and straightness of travel is still no more precise than in the order of magnitude of tens of microns per axis.
Because hexapods have six independently controlled links joined together moving a common platform, the motion error of the platform will be a function of the errors of all links and joints. Hexapods are known to have optimum accuracy and repeatability when performing Z axis moves, because all links perform the same motion at the same relative link angle. However, when any other X, Y, pitch, yaw or roll motion is commanded, accuracy and geometric path performance of the hexapod degrades substantially because all links are performing different motions.
In the case of legacy hexapods built with non-precision joints and motion controllers that are not capable of forward and inverse kinematics equations, the source of error is even more pronounced. With current controller technologies along with higher resolution feedback position sensors, the new controller platforms are able to monitor all the links at nanometer resolution relative to the tool center point precision.
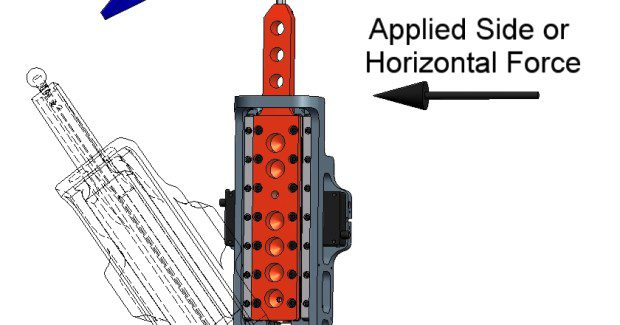
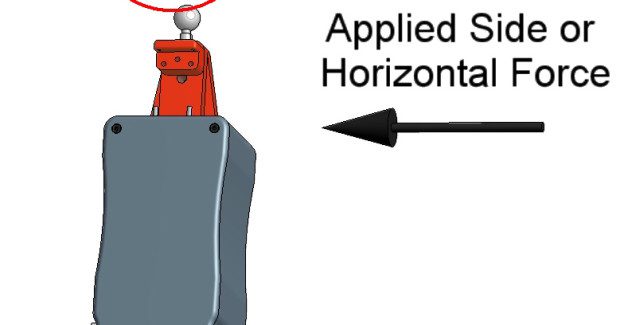
Furthermore, it is a common belief that hexapods have relatively good stiffness compared to serial stacked multi-axis systems. However, it is often only the hexapod’s Z (vertical) stiffness that is considered. Geometric design stiffness has a critical impact on hexapods’ platform repeatability and rigidity.
A lack of design stiffness relates directly to a weak XY plane stiffness with the conventional hexapod working platform. Moreover, this inherent design flaw of the conventional hexapod negatively affects XY axis performance, especially with thermal bonding or machining applications that require more force to be performed accurately within the XY plane.
Subscribe to learn the latest in manufacturing.

Industry News