Getting to True Position in Six Degrees of Freedom
The new nanometer level of precision being achieved by next generation motion systems to meet the high precision demands of metrology, laser processing and micro-machining opens up a whole new realm of application possibilities. This white paper examines how it works.
Posted: July 30, 2014



The Hybrid Hexapod design improvements enable a drastic improvement in positioning accuracy while also increasing velocity, payload, and range of travel capabilities of the system.
STIFFNESS
Stiffness is a measure of deflection when a load is applied and is a common spec for hexapods. Hexapods are advertised as having better stiffness than serial kinematic (i.e. stacked stage) systems. This is true, but most manufacturers will only tell you what they want you to hear.
What they do not publicize is it is only the Z stiffness that is often an improvement and the X and Y horizontal stiffness remains relatively weak. A review of hexapod manufacturer websites will show XY to Z stiffness ratios ranging from 1:10 to 1:32.
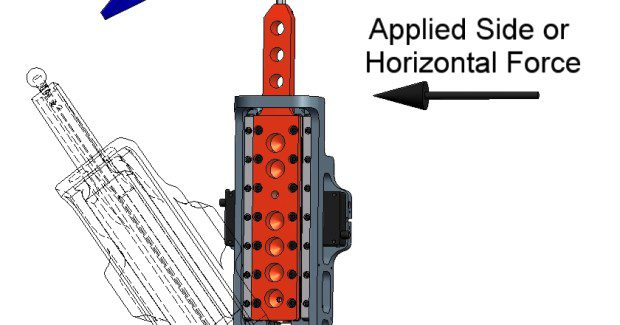
Why is the hexapod so stiff in the Z direction? All six links are typically oriented near vertical and thus the force of all links is near vertical. Why is the hexapod so weak in the XY direction? There are two reasons: 1) the links are near vertical and only the small component of the motor force acting in a horizontal direction defines the XY stiffness; and 2) the hexapod joints to the top and bottom plate are spherical flexures, or universal joints (providing the function of a ball and socket joint) which provide zero mechanical stiffness (see Figure 3a for what happens when you push laterally on a hexapod link). Basically, all you have defining the horizontal stiffness is the small component of the motor/link force that is acting horizontally, and that is only when the motor is engaged/enabled.
In order to improve the overall stiffness, hence performance, the Hybrid Hexapod utilizes the tripod parallel kinematic structure which offers both excellent Z stiffness, from motors aligned in each link vertically, and excellent XY stiffness, from mechanical stiffness of the tripod joints.
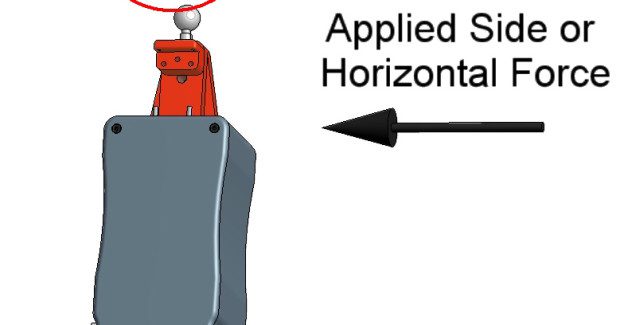
Specifically, the tripod joint between the link and base plate has only one rotational degrees of freedom (i.e. hinge), and thus it allows link rotation in one direction, but provides mechanical stiffness in other rotational loading directions (see Figure 3b for what happens when you push laterally on a Hybrid Hexapod tripod link.). With three mechanically rigid joints positioned at relative angles, the tripod can provide equivalent XY stiffness in any vector direction in the XY plane.
Motion trajectory and straightness are not performance metrics often discussed in conjunction with hexapods or parallel kinematic structures. In fact, a quick review of hexapod manufacturer specifications available on the Internet will show that virtually none mention straightness at all in specifications for their hexapods. That is because hexapods are known by the manufacturers and experts in the field to have relatively poor straightness and motion trajectory performance. Specifically, many standard hexapods will have straightness on the order of 100 µm per 100 mm of travel. (This is compared to a common single-axis stage that can easily be procured to have 1 µm to 8 µm, or less than 1/10th of straightness for the same travel.)
There is a fundamental reason for this poor performance metric of hexapods. First, hexapods actually have reasonable Z motion performance, because to perform a Z motion all six links generally are performing the same motion. Each individual link will have its own error sources that vary throughout its individual (link’s) travel, and when all links perform the same motion, as in a Z move, the differences in the error sources from link to link are minimized. However, when a hexapod performs any single axis X, Y or XY vector linear move (or any single axis rotational – pitch, roll, or yaw – move), all six individual links are still moving but are moving at different speeds, different directions, and over different distances.
Combine the varying link errors with errors associated with defining the actual link, to platform joint locations, and there are simply too many error sources being introduced into the hexapod system to be able to achieve high performance straightness of motion. Furthermore, many hexapod manufacturers do not include forward kinematic calculations in their controller.
Simply said, inverse kinematic equations define where you should end up after the move is complete and they are universally included. Forward kinematic calculations help you determine where you should be during the move. If you are not constantly adjusting the trajectory of the individual links during the move, via forward kinematics, there is literally no control of a trajectory of linear or curved paths.
A Hybrid Hexapod addresses the fundamental issues with gaining high precision trajectory performance with a hexapod. It combines a parallel kinematic tripod (providing known good Z, tip, and tilt performance) with an XY stage designed to provide high performance straightness and trajectory motion in the XY plane.
With a precision XY stage, such as that provided by the Hybrid Hexapod, the link error sources affecting path integrity are reduced to error sources only from the two XY axes, for which the performance can be tightly controlled. In comparison, the Hybrid Hexapod system straightness is less than +/-1 µm per 100 mm of linear travel – two orders of magnitude better than typical hexapod performance.
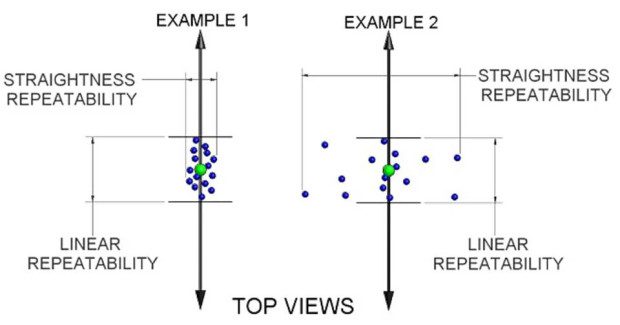
LINEAR DISPLACEMENT AND REPEATABILITY
In a common hexapod, all six links move to make any motion command. A single linear X axis move in a horizontal plane requires all six links to move. That means for any single axis move, whether it is a single rotation or singular linear move, error sources originate from those six different links. This includes errors generated due to miscalibration of each joint location on the links, joint backlash, or even servo dither.
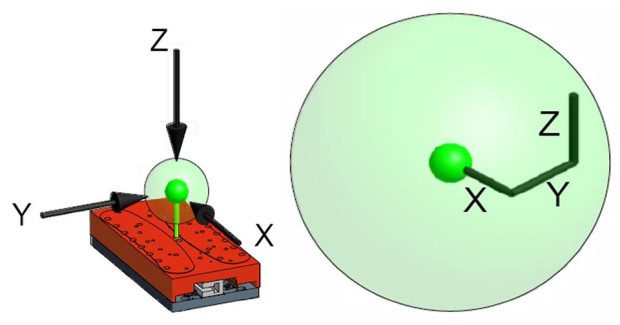
The Hybrid Hexapod is designed to address these issues and provide True Nano accuracy and repeatability performance. Since 6-DOF systems operate in three dimensional space and have errors in all degrees of freedom, all error sources should be recorded and presented. In order to do that, a new method of analyzing motion in three-dimensional space is briefly presented and explained to help illustrate the improvements of the Hybrid Hexapod. This method focuses on measuring, in three-dimensional space, the Point Precision of a functional point of a motion system.
Subscribe to learn the latest in manufacturing.

Industry News






